|
Maxim 串行器可连接并控制摄像头 IC,这类器件包括 MAX9257 (带有半双工 UART/I2C 控制通道)、MAX9259 和 MAX9263 (两款均带有全双工同步控制通道)。MAX9263 还支持宽带数字内容保护(HDCP)。本应用笔记介绍如何将摄像头的 RGB 或 YUV 输出转换成标准显示器接受的 RGB 数据。 4 C G# z- Z. w/ W8 C4 |
摄像头输出数据格式- S0 p' B2 F: a5 s) R
摄像头芯片,例如 OmniVision® OV10630,可通过串行器连接。OV10630 的接口引脚包括:像素时钟、PCLK、行有效、HREF、帧同步、VSYNC 和并行数据位 D[9:0]。数据位在时钟的上升沿保持稳定。
* [( a* {+ M9 M# Y0 y( W* ^0 ZYUV 和原始 RGB 数据格式
* d# C; q5 D) [1 v; D }. u zCMOS 摄像头传感器包括数百万光敏单元,每个单元可响应整个波长的光信号。利用滤光膜使特定传感器仅响应红光、绿光或蓝光信号。相邻的光敏单元通常以拜耳结构的滤色规律排列,绿色滤色片的数量是红色或蓝色滤色片数量的两倍。这种方式用于模拟人眼的感光特性。从左至右、从上至下读取传感器单元输出,原始的 RGB 数据序列为蓝、绿 ... 蓝、绿 (首行末尾),绿、红 ... 绿、红(第二行末尾),依次类推,如图 1 所示。
$ w1 @8 Q- n6 g* X8 }图 1. 原始 RGB 数据排列 8 x2 {, Q0 S! `( o) J
通过相邻单元内插生成与传感器单元密度相同的 RGB 数据。另外,利用相邻单元的颜色,按照特定的规则可以恢复图像。构成每个像素 RGB 数据组的规则之一是:使用同一行的相邻单元,再加上下一行(或上一行)的绿色相邻单元。内插后的 RGB 数据序列为 ...、红(i-1)、绿(i-1)、蓝(i-1)、红(i)、绿(i)、蓝(i)、红(i+1)、绿(i+1)、蓝(i+1)、... 如图 2 所示。每个像素需要一组 RGB 数据,驱动彩色显示器并保持摄像头传感器的最高分辨率。内插 RGB 数据的亮度分辨率接近于传感器单元的分辨率,但色度分辨率较差。由于人眼对每个像素的灰度要比对像素的色彩分量更为敏感,所以感觉到的分辨率基本与传感器单元分辨率相同。
' \- U6 Y% Y% j- k) X. g6 l图 2. RGB 数据排列
, @2 l6 \9 t Z* c9 ^/ O1 D4 w然而,这种 RGB 数据的内插算法使得数据速率增至三倍。为了降低数据速率,尤其是需要图像传输的场合,可采用 YUV 彩色空间(将模拟彩色电视信号压缩到模拟黑白电视的频带)。在下式中,亮度以 Y 表示,蓝色和亮度之间的色差以 U 表示,红色和亮度之间的色差以 V 表示,
4 b: u0 T' k/ l
[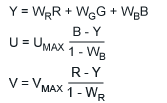
; n' a4 [9 P2 J2 N1 n式中,典型的色彩加权为:WR = 0.299,WB = 0.114,WG = 1 - WR - WB = 0.587,归一化值为 UMAX,VMAX = 0.615。
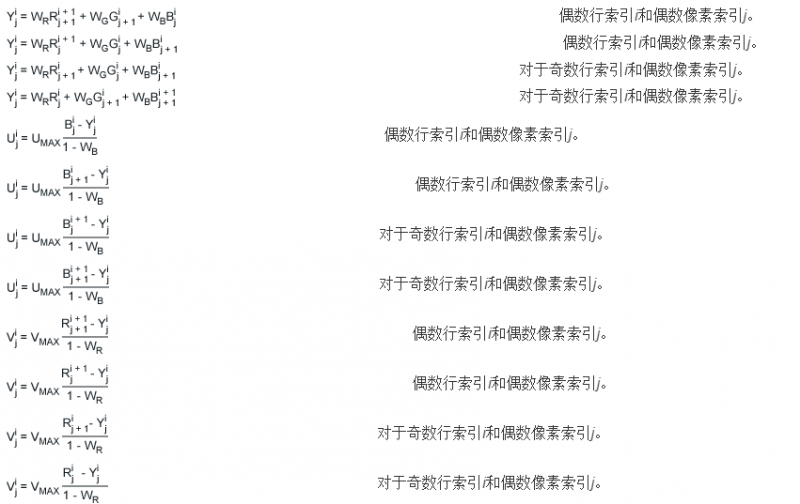
: l4 M, Y8 c9 C) R) v: {对于采用拜耳滤色镜的摄像头传感器,相邻像素的 U 或 V 数据大致相同,取决于行索引 i 和像素索引 j (如果采用的规则为相邻颜色)。利用本指南,可根据下式利用 RGB 数据直接生成 YUV 数据。
* B, y% u4 q! {# w w' s3 _8 M
1 S, S7 V9 y" ?
为了降低数据速率,利用偶数像素索引的 U 数据和奇数像素索引的 V 数据,以及偶数和奇数像素索引的 Y 数据。压缩后的 YUV 数据按照图 3 所示排列发送,即:Y1、U0 和 V1 为像素 1 的数据;Y2、U2 和 V1 为像素 2 的数据等。
- a2 J+ }+ f S* e 图 3. YUV422 数据排列
* D- W8 E2 W# p' I. |( R$ z/ Z1 P422 表示 Y:U:V 的采样比,4:x:x 标准为早期彩色 NTSC 标准,按照 4:1:1 色度再次采样,所以,图像的色彩分辨率仅为亮度分辨率的四分之一。目前,只有处理非压缩信号的高端设备才会采用 4:4:4 彩色再采样,亮度和彩色信息的分辨率完全相同。
% n: C$ ^9 [/ Y9 C/ O4 S串行器输入格式
; r$ \# c! ^, \7 w% sMaxim 串行器的并行接口设计用于 24 位 RGB 数据,特别是 MAX9259,具有像素时钟位(PCLK)和 29 个数据位,用于 24 位 RGB 以及行同步、场同步和 3 个控制位。除并行数据接口外,需要把 DRS 和 BWS 引脚设置成高电平或低电平,分别选择数据速率和总线宽度。
) z& h9 A: Z; T* q" l
Maxim 串行器 / 解串器/ C4 L1 ~$ J5 f( g8 h% T
MAX9257 和 MAX9258 串行器 / 解串器(SerDes)具有 18 位并行输入 / 输出,适用于 YUV 数据传输;MAX9259/MAX9260 芯片组具有 28 位并行输入 / 输出,适用于 RGB 数据传输;MAX9263/MAX9264 SerDes 具有 28 位并行输入 / 输出,增加了 HDCP 功能。此外,MAX9265 和 MAX9268 28 位 SerDes 带有摄像链路,代替并行输入 / 输出接口。所有 28 位 Maxim 串行器和解串器具有相同的并 / 串数据映射,可互换使用。例如,MAX9259 串行器可配合 MAX9268 解串器使用,传输 RGB 数据(借助于 FPGA)。数据从 CMOS 摄像头通过串行链路发送至摄像链路接口的显示器。
8 O% J8 }( w: D8 Y% v! C串行器映射
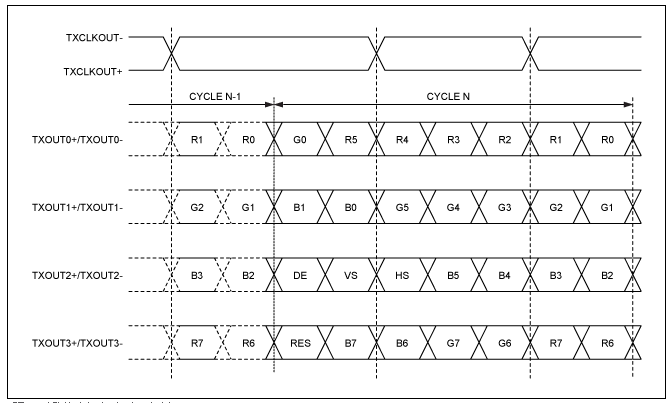
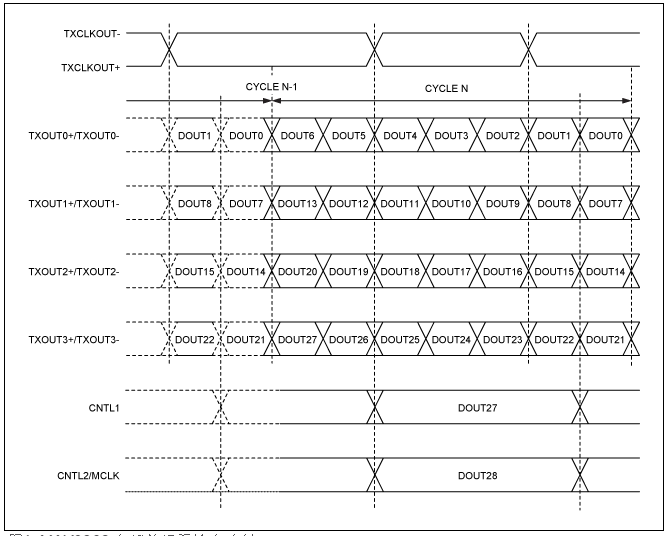
# D; s( @& R6 B. D# k- G为匹配 MAX9268 解串器摄像链路的输出接口,并行 RGB 数据应按照以下信号图映射。图 4 所示为 MAX9268 并行位与其摄像链路输出之间的映射,图 5 所示为相机链路的 RGB 数据映射。表 1 所示为 MAX9259 串行器的对应内容映射。- E" }. ~' J# u, \; _* X
图 4. MAX9268 内部并行至输出映射 9 K) i- z/ U; V' U5 X m/ g
, I" Q$ B5 v- h1 F' |. q b
! \4 k4 ?; k+ ]& n2 |5 f* b0 A图 5. 摄像链路内容映射
! u8 h/ o- u/ ]+ L( S- h1 d表 1. MAX9259 串行器 RGB 内容位映射) q% h2 a& O# {/ Y2 y4 h+ u7 I
$ J# m3 t0 x0 J色彩转换:YUV 至 RGB
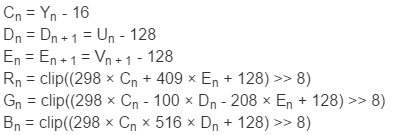
_- X; `' L9 A+ D4 J3 x+ LFPGA 芯片可将压缩(降低数据速率)后的摄像头数据 YUV 转换成 RGB 数据,用于 MAX9259 串行器。采用 8 位定点运算时,色彩空间转换的公式如下,式 2 和式 3 中,Dn 和 En 的 n 为偶数。1 V+ Z7 `6 T, I- s# w$ A
2 T1 d. r! s1 U" [# D8 QFPGA 方案# y. |* \! k) u2 ]! b
输入缓冲
输入缓冲电路包括计数器、三个寄存器和组合逻辑,将单字节时钟输入转换成三字节时钟输出,输出时钟速率为输入的一半。组合逻辑仅用于分别使能 Y、U 和 V 字节的对应寄存器。
1 k, x- @) p& p$ i: ?/ d) S" z3 F 图 6. 输入缓冲电路 / k/ h# z( K& x' c5 e; f
时钟开关 FPGA 输出像素时钟速率为摄像头像素时钟的一半,用于驱动串行器像素时钟输入。但是,摄像头在初始化之前不会输出像素时钟。解决方案是在 FPGA 内部采用 2:1 时钟复用器(mux)和时钟信号检测器,mux 由时钟信号检测器控制。上电时,mux 的默认时钟来自摄像头的时钟振荡器,使 SerDes 芯片组提供启动摄像头的控制通道。时钟信号检测器对场同步信号脉冲进行计数,经过几个场同步脉冲后,mux 切换到摄像头像素时钟速率的一半。采用高清摄像头传感器时,例如 OV10630,每个场同步周期包含 100k 以上的像素时钟。几个场同步周期足以使摄像头的锁相环(PLL)达到稳定。场同步计数比像素时钟计数的效率高得多,并可节省 FPGA 逻辑单元的资源。
5 B: ^+ }! ]- D7 ~中间缓冲
格式转换表达式中没有体现硬件电路的延迟。为了从 YUV 输入生成 RGB 数据,需要两到三次乘法运算和三到四次加法运算。尽管 FPGA 逻辑电路(门电路) 的延时只有几个纳秒,但载波传输、加法器、移位乘法器都会导致不同程度的延时,使整体延时增大。为了使延迟最小化,每个常数乘法器均由两个移位输入(代表常数的 2 个非零最高有效位 MSB)的加法器近似。输入的 YUV 字节速率大约为 100MHz 时,延迟会跨越相邻像素的定时边界,增大图像噪声。在每个乘法器之后通过中间寄存器来消除扩展延时。
, ~+ l* f" ~# Z* Z以上提及的 YUV 至 RGB 彩色转换已用于 Actel® ProASIC3 A3PN125Z FPGA,图 7 所示为实现这一 FPGA 的原理图。% i: b$ T6 G& H4 J' S0 r
, k. ?/ w N$ u9 `清晰图像(PDF, 172kB) + _. e. W2 L3 j5 U
清晰图像(PDF, 180kB)
: k2 V. P# ]; F8 y图 7. YUV 至 RGB 转换器的 FPGA 实现
5 M5 Z' ~7 q- U8 w$ @应用电路
厂家提供的摄像头芯片可能位于 PCB 子板,图 8 所示为摄像头子板模块的功能框图。输入包括电源、PWR 和晶振时钟(XCLK)。输出信号包含并行数据位(D0..D9)、I2C 总线(SDA、SCL)、视频同步(HREF、VSYNC)和像素时钟(PCLK)。
" O) V+ {$ _2 ~5 o# H% U图 8. 摄像头模块功能框图
B1 E6 R7 ^$ M$ P- b, |& {2 v图 9 所示为应用电路的 FPGA 和串行器芯片的原理图。电路通过两对双绞线组成的串行电缆供电,一对用于传输串行信号,另一对用于供电。独立的 LDO 电源 IC 用于串行器和 FPGA 器件。摄像头模块采用旁路电容,自带 LDO 电源芯片,进一步降低潜在干扰。FPGA 和串行器之间的数据链路采用阻尼电阻。6 W8 T$ p* S2 S$ D$ \
[url=]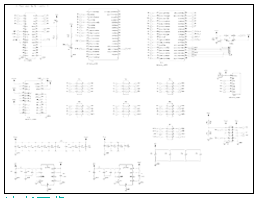 [/url] [/url] 图 9a. 应用电路的 FPGA 部分
& i4 [$ E, |+ a' W" J. j. j[url=] [/url] [/url]
& v2 Y' b* `% s% n, _( z* R( n! p, N$ O( Z0 U6 {1 X- N
图 9b. 应用电路的串行器部分
9 E- c1 x, s" Q& i& dMAX9259 也能够直接连接至摄像头传感器,例如 OV10630,以构建更小的摄像头。彩色空间转换 FPGA 可置于解串器之后。由于这种应用需要摄像链路输出,可直接由 MAX9268 驱动,所以彩色转换 FPGA 置于摄像头传感器和串行器(MAX9259)之间。
' t' J* q+ Y O1 F视频采集示例
% }0 X+ O$ S' z1 |
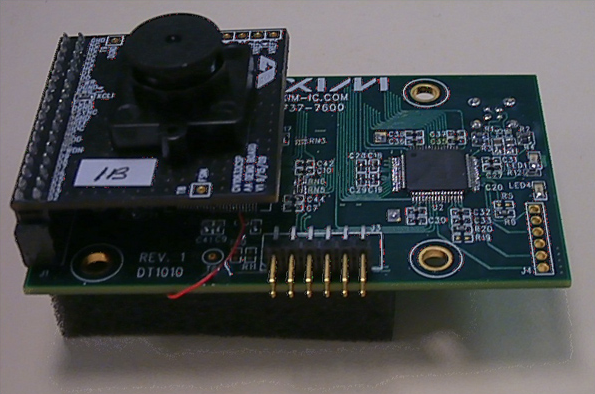
图 10 所示摄像头应用电路也是利用这些摄像头电路搭建的。
8 ^4 E1 l: g2 M2 g! ^' M2 B1 P图 10. 摄像头应用电路
) _6 @& D$ K3 c结论
+ g: n/ B" @' {4 v; q( e本应用笔记介绍 Maxim 的摄像头解串器 IC 与 FPGA 配合工作的典型方案。提供应用原理图和 FPGA 代码,用于现有的参考设计。即将给出本应用笔记的升级版:RAW RGB 至 24 位 RGB FPGA 转换器。
+ k" I" H. ^0 ~, Q. ` | 



 窥视卡
窥视卡 雷达卡
雷达卡 发表于 2021-9-11 09:02:47
发表于 2021-9-11 09:02:47







 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡











 |站点统计|小黑屋|手机版|Archiver|摄像头模组论坛网
( 粤ICP备18155214号 )
|站点统计|小黑屋|手机版|Archiver|摄像头模组论坛网
( 粤ICP备18155214号 )